







RF 10-20mm F4 L IS STM 開發者訪談

RF 10-20mm F4L IS STM 開發者訪談
受訪陣容

Akihiko Masuki
開發負責人/機械設計
影像通訊事業處
ICB 光學開發中心

Makoto Nakahara
光學設計
影像通訊事業處
光學技術開發中心

Masato Shiono
機械設計
影像通訊事叢處
ICB 光學開發中心

Fuya Mizuochi
電力設計
影像通訊事業處
ICB 光學開發中心

發展理念是什麼?
Masuki : 此概念是一款緊湊、輕巧的超廣角鏡頭,可實現舒適的手持攝影。Canon 相信 EF11-24mm f/4L USM 給了世界超廣角拍攝的驚喜。而 RF10-20mm F4L IS STM,廣角端為10mm並內建IS防手震,且體積小,重量約為 EF 11-24mm f/4L USM 的一半,大大提高了便攜性,賦予我們新的驚喜。主要拍攝題材為風景、建築和天文攝影。 這種獨特的鏡頭可以在一張影像中涵蓋更寬廣的主題。更小的尺寸和更輕的重量提高了便攜性,增加了手持攝影的機會,同時利用光學防手震和機身防手震進行協調控制,以及邊緣協調控制,進一步提升拍攝的舒適度。

利用大口徑接環和短後對焦距離、10mm 超廣角焦距和更小更輕的設計,並內建光學防手震。
這次為什麼要嘗試達到10mm?
Masuki : 即使在使用超廣角鏡頭拍攝建築和風景攝影中,我認為也有一個壓力,就是想要將主體放入更廣的視角中。除非它的焦距是 10mm。另外,有些人使用廣角鏡頭和雲台來拍攝電影。到時候,我想我一定能拍出有氣勢的照片,將眼前的一切風景都呈現出來。我認為有很大一部分可以讓你拍攝出令人印象深刻的影像,這是其他鏡頭很難做到的,無論是靜態影像還是動態影片。
更廣角的設計和 EF11-24mm f/4L USM 的思想

使您已經擁有 RF 14-35 mm F4 L IS USM 或RF 15-35 mm F2.8 L IS USM,它是否是您所需的鏡頭?
Masuki : 我們經常聽到使用者希望在一個螢幕上整齊地捕捉遠處和近處的物體。例如,在拍攝背景中整個摩天大樓的同時也拍攝其前面的物體的場景中,如果您使用 14mm 或 15mm 焦距鏡頭,如果您嘗試拍攝相同角度的摩天大樓,則它不會是動態的視圖,如果您嘗試拍攝前方物體的更大影像,您將無法將高層建築放入螢幕中。 為了在這樣的場景中獲得拍攝對象的平衡視角,超廣角鏡頭是有優勢的,而且增加了拍攝的自由度,我想這支鏡頭是唯一可以實現的。另外,10mm 大約是 14mm 寬的 2 倍。使用變焦鏡頭變焦或四處移動是確定如何適合拍攝主體的一種方法,但是當您想要使用所需的構圖進行拍攝時,例如使用 RF 10-20 mm F4L IS STM,如果沒有這種超廣焦距的卓越性能鏡頭,您就無法做到這一點。

焦距為 10mm 的範例。利用10mm的獨特視角,捕捉從地面交通標誌到背景建築物的廣大區域。
與 EF 11-24mm f/4L USM 相比,重量顯著減輕,但使用 EF 11-24mm f/4L USM 的使用者是否有過對超廣角鏡頭的要求?
Masuki : 許多專業使用者和口碑都表示 EF 11-24mm f/4L USM 的重量約為 1180 克,很重。當你把它與相機結合時,它的重量通常超過 2 公斤,如果你在外面拍攝一天,你將會拿著一個 2 公升的塑膠瓶,所以我認為我們的使命是減少那個負擔。
RF 10-20 mm F4L IS STM 結合了 RF 接環的大口徑/短後對焦距離和相機內變形校正,具有緊湊的光學設計。此外,它在保持強度的同時減輕了重量,重量約為 570g,幾乎是 EF 11-24mm f/4L USM 的一半。

縮短的長度和直徑使其易於存放在相機包中。
RF10-20mm F4 L IS STM
最大直徑: 約 φ83.7 mm
總長度: 約 112 mm
重量:約 570 g
EF11-24mm f/4L USM
最大直徑: 約 φ108.0 mm
總長度:約 132 mm
重量:約 1180 g

請告訴我要達成 10mm 焦距的重要要點以及您遇到的困難
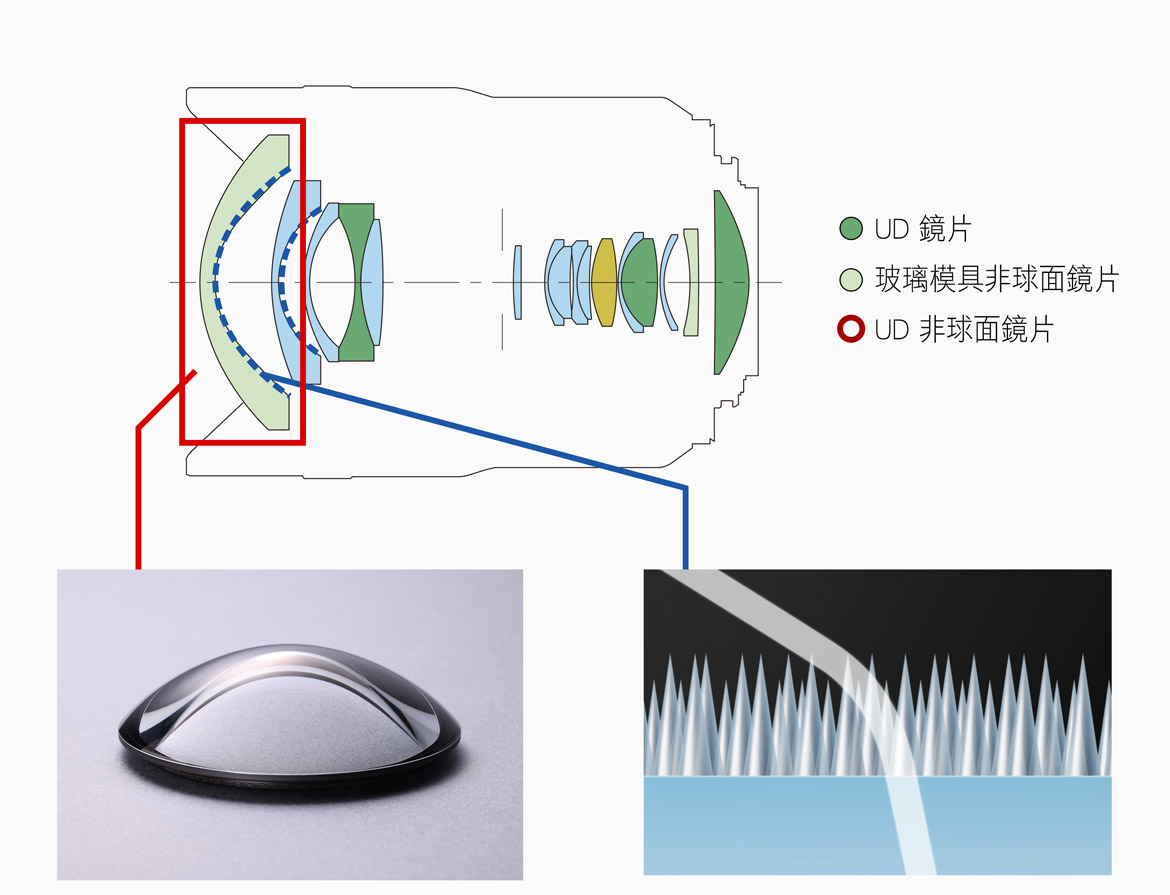
Nakahara : 角度越廣,確保短後對焦距離和抑制變形像差就越困難。 因此,RF 10-20mm F4L IS STM 是一款充分利用 RF 大口徑接環、短後對焦距離和機內變形校正特性的鏡頭。EF 11-24mm f/ 4L USM 在影像品質方面享有盛譽。此外,RF 10-20mm F4L IS STM 還需要在前鏡頭上安裝大光圈雙面非球面鏡頭,以實現 10mm 廣角同時實現高影像品質。非常重要的一點是,我們能夠在製造團隊的開發部門的共同努力下,追求並實現理想的形狀。
前鏡頭的大口徑、大曲率、雙面非球面鏡片作為關鍵零件,設計與製造難度大嗎?
Nakahara : 非球面鏡片越大,精確加工就越困難。鏡頭的影像感測器一側塗有 SWC 鍍膜,以防止重影和眩光,但較大的曲率使其難以均勻塗層。我們與製造團隊合作,進行了多次模擬,以找到能夠實現高性能、高精度並考慮大量生產的理想形狀。
如果不能實現這種非球面透鏡,就不可能同時實現高性能和小尺寸。
|
玻璃模具大直徑大 |
SWC(次波長結構鍍膜的縮寫)是一種特殊鍍膜,可實現優異的抗反射效果,特別是對於大入射角的光。大曲率鏡片減少了周邊耀斑鬼影的發生。 |
光學設計技術實現 10mm 焦距和高影像畫質
為什麼選擇 10-20 mm 焦距?
Nakahara : 我們有一個發展方針,就是希望整個RF鏡頭能夠提供EF鏡頭無法提供的價值,並以多種方式表達出來。 透過這款鏡頭,我們希望實現 10mm 的超廣角。如果加大超廣角變焦鏡頭的變焦倍數,就很難保持高畫質,整個區域的畫質不高或尺寸增加。由於焦距長達 20mm,易於用於影片錄製,因此我們決定使該鏡頭易於用於靜態影像和動態影片。
採用什麼樣的技術來實現高畫質效能?
Nakahara : EF 11-24mm f/4L USM 是一款大鏡頭,但它採用了磨光非球面鏡片和超級UD鏡片,因此具有非常高的成像品質。 因此,RF 10-20 mm F4L IS STM 的影像品質目標相當高。儘管我們的目標是縮小廣角鏡頭的尺寸和重量, 但我們無法創造出影像品質低於 EF 11-24 mm F4L USM 的設計。因此,我們透過正確排列非球面鏡片、super UD 鏡片和 UD 鏡片,同時在加工和組裝上以高精度製造它們,從而實現了高影像品質。
此外,有些人可能會看到因相機內變形校正而導致影像品質下降的影像。然而,考慮到變形像差以外的像面曲率、倍率色差以及其他影響影像品質的像差,變形校正後影像品質設計等於或高於EF11-24mm f/4L USM。我們內部光學設計軟體的發展為適應時代變化的設計開發做出了巨大貢獻。


光學設計軟體的演進是?
Nakahara : 一個代表點是模擬技術的演進。這個軟體是內部開發的,可以根據設計方的回饋進行改進。例如,可以進行各種模擬,例如假設相機內變形像差校正的光學性能評估、公差分析和重影視覺化。過去,年輕的工作人員可以將一束光的追蹤結果列印在紙上並進行檢查,但相比之下,透過模擬可以做的事情要多得多。
UD 鏡片 Super UD 鏡片
實現理想色差校正的鏡頭經過適當排列,可實現高影像畫質,同時減少從畫面中心到週邊的色彩模糊。

請告訴我您在尺寸小和重量輕方面遇到的困難。
Nakahara : 我們正在推進光學設計,其目的是在保持高影像品質的同時盡可能縮小尺寸和重量。與機械設計團隊合作,我們也專注於每片玻璃的夾持方法,以實現高品質和穩定的製造。除了前透鏡之外,我們還使用了許多薄型凹透鏡,這是小型化和輕量化所必需的,以及大曲率凹透鏡,這些透鏡很難高精度加工。製造事業部實現了開發者的願望,推動小型化、輕量化。

RF 10-20mm F4L IS STM配備超廣角鏡頭,尺寸與 RF 14-35mm F4L IS USM 相同
Shiono : 在設計初期,我們就希望能夠符合與 RF 14-35mm F4L IS USM 相當的外部尺寸,並以此為目標進行了設計。其中,我們在光學設計團隊上下了功夫,透過能夠變焦兩組鏡頭,縮短了凸輪筒的長度。在設計方面,重要的是要考慮包括前透鏡在內的第1組是否可以裝入凸輪筒的前半部分,以及如何從強度的角度確保凸輪的尺寸和凹槽。
包括前透鏡的第一組穿過前凹槽,另一組穿過後凹槽。隨著獨立變焦組數量的增加,需要額外的凸輪槽來支撐該組,並且圓柱體必須沿著光軸延伸。另外,當圓柱體被拉伸時,需要在徑向上加寬圓柱體以適應一組透鏡,並且尺寸增加。 我認為我能夠透過從每個參與者那裡獲取想法來設計出目前的尺寸。

重量減輕不會影響堅固性嗎?
Shiono : 透過在設計過程中檢查模擬中的細節,我們能夠保持與傳統 L 鏡頭相同的堅固性,同時減少金屬部件的數量。以凸輪為例,包括前鏡頭在內的鏡片組很重,但透過在凸輪上放置多個凹槽來支撐它們,我們設計了一種方法,即使在凸輪掉落時也可以分散衝擊力,並減少對光學性能的影響。
模擬與真實的一致性較高,因此有些地方提倡減重設計。 同時,實際設備上正在進行穩健性測試。
為什麼全開光圈使用 F4 而不是 F2.8?
Nakahara : 首先,我們認為透過優先考慮更廣泛的角度,我們將能夠提供以前無法做到的表達方式。即使在開發初期,也考慮過各種焦距和F值,但基於影像品質和尺寸等各種平衡選擇了F4。
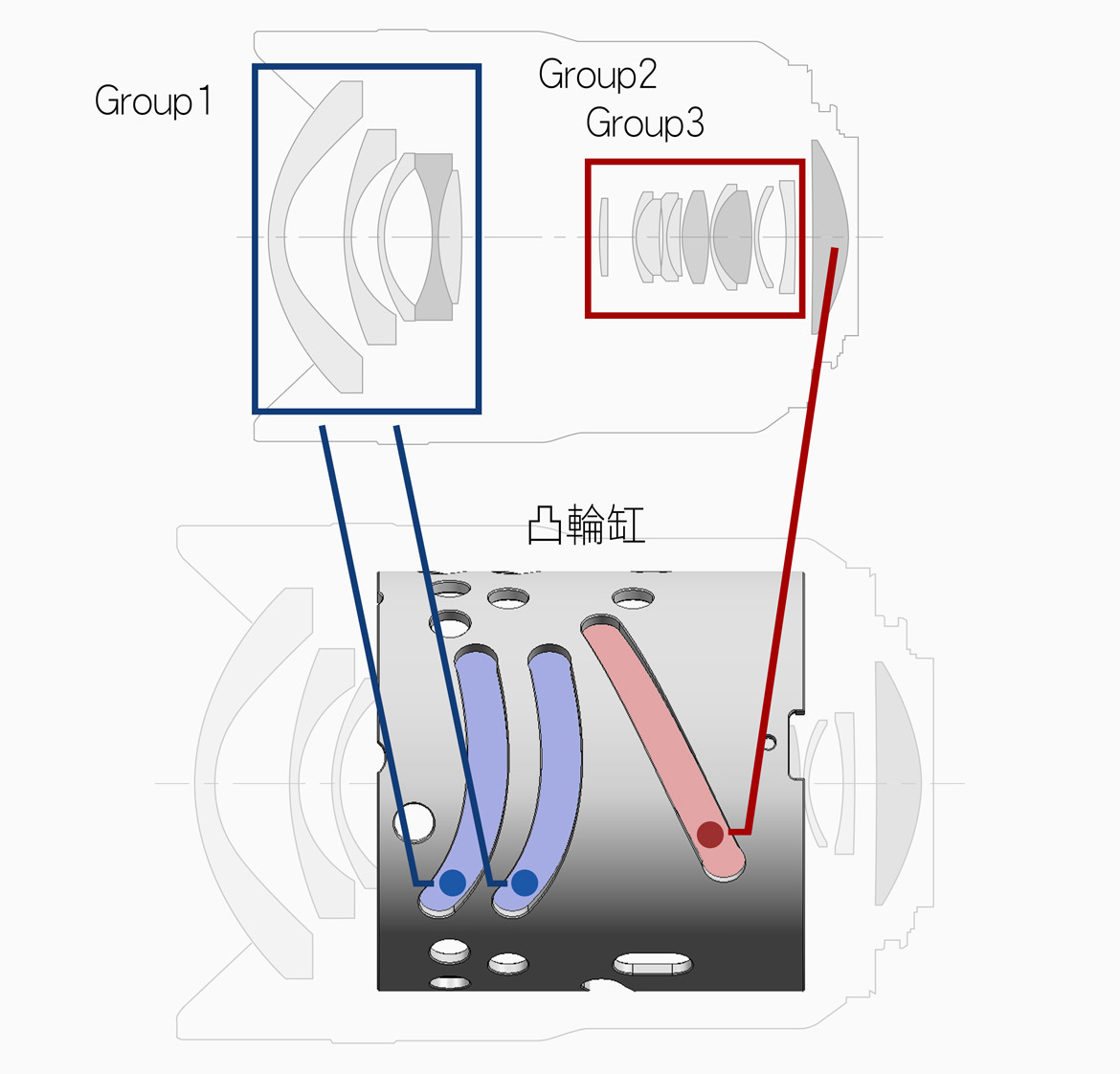
前置鏡頭支援 Group1,後凸輪支援 Group 2 和 Group3。如果設計有更多組,則凸輪可能需要進一步延伸以支援它們。
04 | 內建防手震
安裝新的 IS 防手震技術以減少週邊模糊
我想有很多人認為廣角鏡頭不需要IS。為什麼要安裝 IS?
Nakahara : 事實上,角度越寬,周圍的影像因透視而扭曲的程度就越嚴重,周圍的模糊程度就越嚴重。為此,我們開發了一種光學設計,將 IS 組件放置在影像感測器較近的那一側,以減少鏡頭本身的周邊模糊。此外,還可以與相機的內建IS進行協調控制,進一步減少週邊模糊。



| 有外圍協調控制 | 無外圍協調控制 |
IS 組件距離感測器越近,補償是否變得越容易?
Nakahara : 放置在影像感測器那一側不一定更好,但如果你想有效減少週邊模糊,感測器那一側可以更容易控制光線。起初,它並不是這樣設計的,但是當我們進行模擬時,我們意識到這種類型更能減少週邊模糊。此外,IS 鏡片的形狀經過精心設計,中心模糊得到了很好的平衡。
我們反覆討論過如何配合機械設計團隊。光學設計得好不好,是否要更換 IS 鏡片,採用目前的光學排列。
在 IS 安裝和外圍協調控制方面,您有做過哪些改進或遇到什麼困難嗎?
Mizuochi : 為了保持以影像為中心的性能,同時減少週邊模糊,需要比以前更複雜的 IS 控制。我們尤其在相機控制和鏡頭控制方面遇到困難。與普通協調控制相比,鏡頭中的 IS 移動更多以補償外圍。同時保持畫質,機身內的 IS 協同移動,補償整個畫面的模糊。為了很好地交換相機和鏡頭的資訊,相機開發團隊和演算法的反覆測試和改進,最終實現了該系統。

IS 鏡片組件


使用廣角鏡頭時,影像周圍的主體會因透視而變形。同樣的道理,它周圍的模糊也會增加。
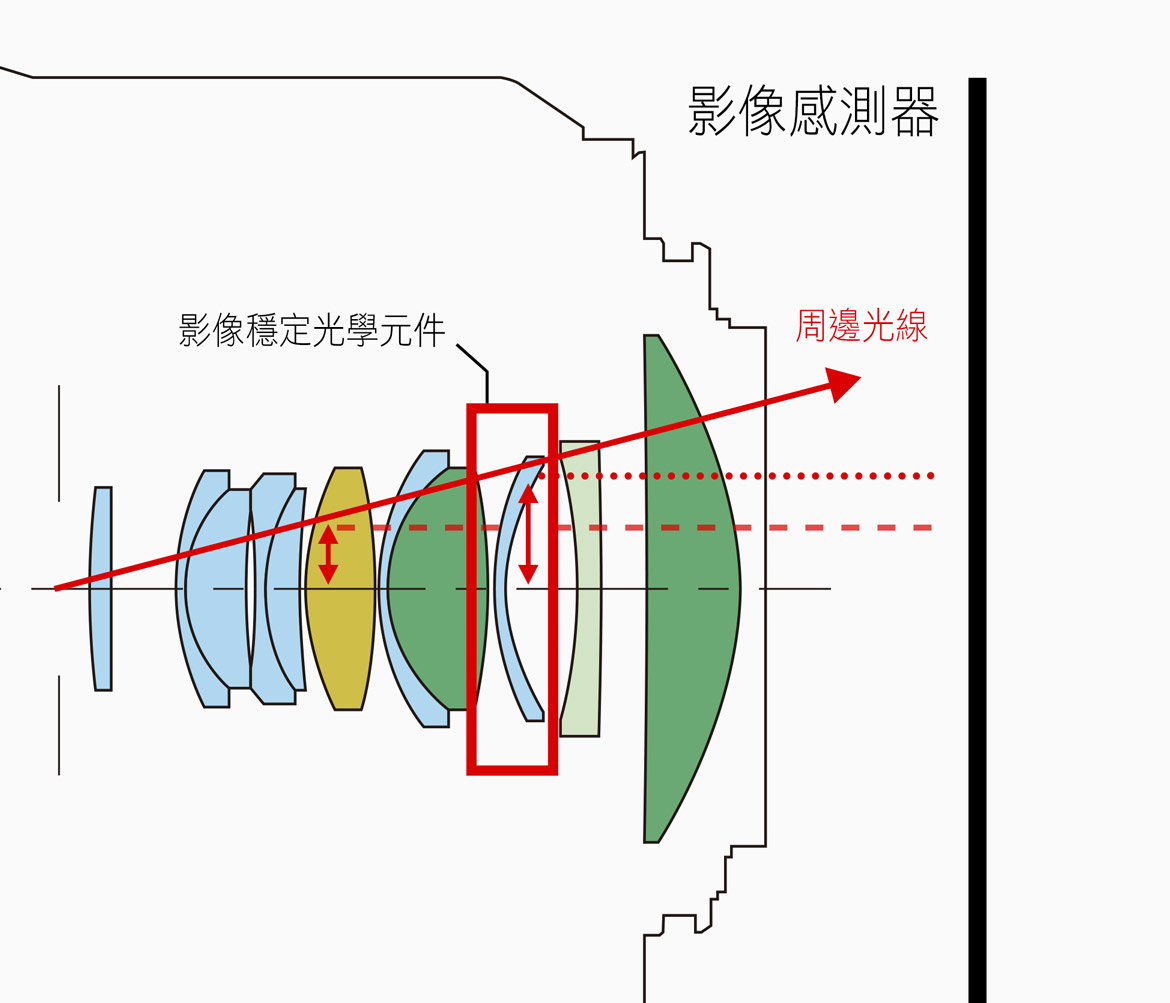
感測器周圍形成的光線從孔徑中心向感測器移動。與影像感測器側的 IS 組件相比,IS 組件位於光圈附近時,更容易控制穿過週邊的光線並校正週邊模糊。

週邊協調控制如何彌補週邊的模糊?
Mizuochi : 當相機發生移動時,拍攝主體的整個影像會發生移動,周圍區域也會變形。特別是,鏡片越寬,週邊變形越明顯。IS鏡頭的優點是除了可以移動影像之外,還可以變形和校正週邊。另一方面,機內機身 IS 的優點是只能對整個影像進行平移,而不能像鏡頭IS一樣對週邊進行變形和校正。另外,雖然可以單獨設計鏡頭 IS 來補償特定焦距或焦距下整個畫面的模糊,但難以補償各種焦距或被攝體距離下的周邊。週邊協調控制透過利用光學 IS 和機內 IS 的特性進行協調操作,可以提高週邊的防手震效果。
| IS 種類 | 特色 |
| 僅內建IS(機內) | 僅無法校正影像偏移。無法校正畫面周圍的模糊 |
| 僅光學 IS(鏡頭內) | 允許影像移位和變形校正。無法根據焦距或焦點進行週邊校正。 |
| 外圍協調控制 | 移動和變換影像透過組合移動可以進行週長修正。 |
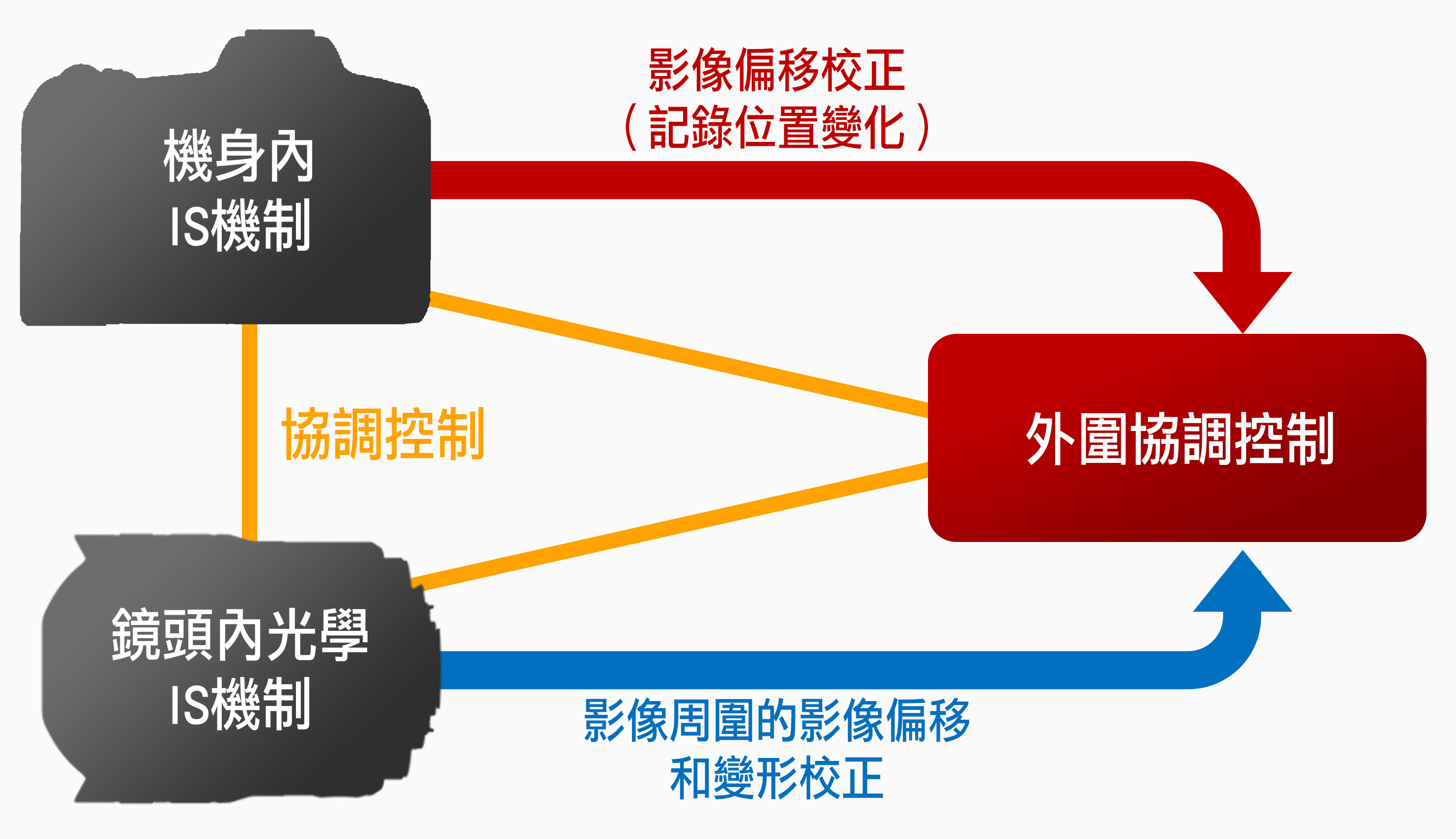
透過利用機身防手震和鏡頭防手震的特點,我們實現了抑制週邊影像模糊的新控制。 (截至 2023 年 10 月,支援EOS R5 Ver.1.9.0 或更高版本。)

請告訴我 L 鏡頭第一次使用步進馬達的背景。你們採取了哪些措施來加速自動對焦?
Masuki : 如果你看一下對焦鏡片,你會發現它是一個非常小的鏡片。USM 在長行程方面具有優勢,但由於該鏡頭是短行程設計,因此我們認為即使是步進馬達也能提供良好的性能。與 USM 相比,步進馬達的執行器更小,但這實際上提高了 IS 鏡片組的排列自由度,允許將 IS 放置在感測器那一側。換句話說,步進馬達也有助於減少週邊模糊。

Nakahara : 對焦鏡片的放置和合適玻璃的選擇使得對焦鏡片輕量化且相容於高性能。由於畫面周圍形成的離軸光線在光圈附近穿過光軸,因此光圈附近的廣角鏡片的鏡片直徑相對較小。因此,將聚焦透鏡放置在光圈附近使得聚焦透鏡更小並且更容易減輕重量。此外,由於使用了具有色散特性的玻璃,可以抵消對焦過程中出現的色差,使得對焦鏡片在實現高影像品質的同時變得緊湊、輕巧。 為了擴大光學設計的可能性,我們日復一日地開發新的玻璃材料。此外,移動對焦鏡片的行程設計得較短,因此可以提高自動對焦速度。
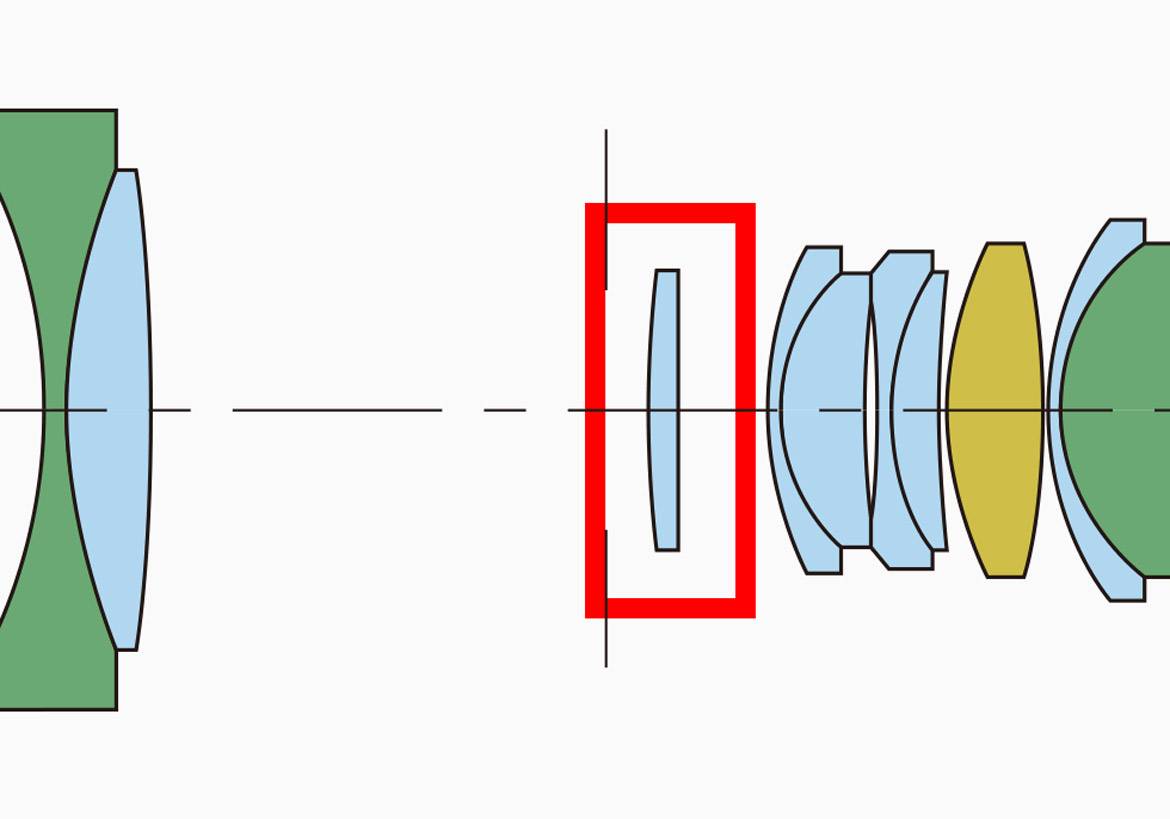
用於對焦的鏡片。該設計考慮了減輕重量和均勻行程以實現高速自動對焦。
Shiono : 步進馬達採用絲槓式,引線部分的長度會根據聚焦透鏡的行程而變化。行程越長,馬達整體長度越長,支撐引線的零件也越大,整體方向越大。這也與體積小密切相關。
Mizuochi : 步進馬達本身安裝在其他鏡頭中,但在傳統產品中被製成高速旋轉。這是透過與機械設計團隊合作透過反覆試驗來優化速度來實現的。我還認為步進馬達是一種非常好的執行器,因為它可以透過相對簡單的配置進行高精度控制。
但缺點是運行前需要確定初始位置,且啟動時間較長。該鏡頭是首款配備具有位置感測器的步進馬達RF鏡頭,透過縮短啟動時間,整體性能可與 USM 相媲美。
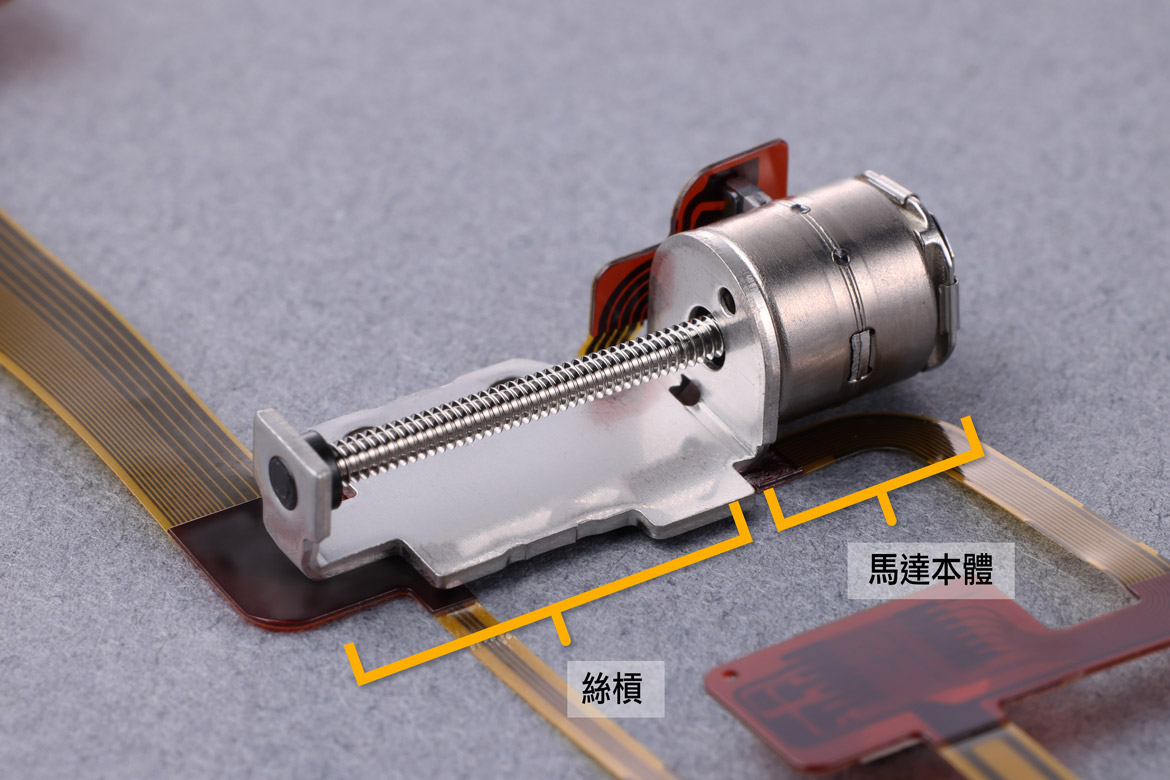
RF 10-20 mm F4L IS STM 的步進馬達。聚焦鏡片的行程決定絲槓的長度。
較短的對焦鏡片行程不僅有助於更快的對焦,而且有助於縮小尺寸並提高影像穩定器性能。
RF10-20 mm F4 L IS STM 開發人員
Makoto Nakahara (光學設計)、Masato Shiono (機械設計)、Akihiko Masuki (開發負責人/機械設計)、Fuya Mizuochi (電力設計)
如果您對我們使用 RF 10-20 mm F4L IS STM 的期望場景有任何意見,請告知我們。
Masuki : 如果你看焦距為 10mm 的觀景窗,可以感受到接近雙眼所看到的視野的寬度。在高解析度下,人類只能辨識焦距為 50mm 的視場中心,但該鏡頭可解析到螢幕的外圍。 它也可以說是一種可以切割人類清晰地注視角落的大範圍動態畫面的鏡頭。例如,如果您想以單一視角拍攝大型建築物或大片區域,並希望拍攝出一如既往的震撼力照片,那麼這款鏡頭就是一個好主意。另外,如果這款鏡頭被納入 F4 L 變焦鏡頭系列中,那麼陣容中就不會存在 10mm 和 200mm 之間的差距,並且可以以更廣泛的方式使用。
Shiono : 作為一款適合風景攝影的超廣角變焦鏡頭,我認為它的尺寸和重量足以讓攝影師毫不猶豫地多帶一支。希望大家出門攜帶它,用在新的拍攝領域,那就是超廣角。
Nakahara : 使用超廣角變焦鏡頭,我平常看到的風景與日常風景完全不同。這款鏡頭剛製作時非常緊湊,當我看著取景器時,我的感覺是房間非常大。我希望您透過觀景窗體驗這個超廣闊的世界。
Mizuochi : 我認為以前從未見過的超廣角變焦鏡頭已經完成了易於攜帶的尺寸。即使 EF 11-24mm f/4L USM 不便於攜帶,有了這支鏡頭也能更輕鬆地拿出來。希望您能體驗一下利用超廣角和強烈視角的強大拍攝效果。
您希望使用者未來如何使用 RF 鏡頭系列?
Masuki : 由於我們擁有一系列高度便攜的鏡頭,因此我們希望您攜帶多個鏡頭,並根據您想要拍攝的場景使用不同的鏡頭來享受拍攝的樂趣。
Shiono : 與 EF 鏡頭時代相比,RF 鏡頭在小尺寸、輕重量和 IS 協調控制方面不斷發展,但我相信融入先進技術的鏡頭數量將會不斷增加。我們正在為此努力,所以我認為如果選擇 RF 鏡頭作為使用者實現影像不可或缺的鏡頭,那就太好了。
Nakahara : 我知道很多人都用智慧型手機拍照,但如果您能選擇一款富有個性的 RF 鏡頭系列,不僅可以記錄您所看到的內容,還可以記錄您的感受和情緒,我將不勝感激。
Mizuochi : 相較於 EF 鏡頭時代,相機已經進化了,可以更隨意地拍照。對於初學者來說,創建漂亮的照片很容易,而對於專業人士和進階使用者來說,我認為環境正在變得更好,他們可以更專注於創作作品。如果廣大使用者能夠選擇 RF 鏡頭作為實現各種表達的必備工具,那就太好了。


